Remote dismantling operations -Wagr decommissioning
Exploring Innovative Approaches 2002
JR COSTES, Ch. LEGOALLER,: CEA/UDINMarcoule – France
P. VALENTIN: CEA/CEREM Pierrelatte; G. PILOT: CEA/IPSN Saclay
The WAGR (Windscale Advanced Gas Reactor) dismantling, bridgehead of future dismantlings of graphite-gas reactors, is an extremely important textbook case, which rightly should use the most modern techniques, enabling the choice of the scenario which is best-suited to lowering the doses received by the operators, the costs and the volume of the wastes.
Looking toward the future, the European Community provided precious assistance (Contract Number FI4D-CT95-0006 )
which helped to successfully implement four promising techniques on a major site:
3-D simulation of remote-operation work, is vital for:
- operators training
- specifying the machines and the tasks they must accomplish
- optimizing the cutting.
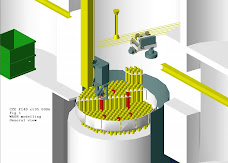
This work, which was conducted with the ROBCAD software package, was finally converted to IGRIP upon request from the Prime Contractor. The entire environment and the machines were simulated, as were the first steps of the dismantling operations.
The Remote Dismantling Machine was modelled, i.e. the mast, the manipulator hoist platform, the manipulator arm and gripper, the 3 Te hoist and the maintenance and sentencing cells.
The reactor core has also been modelled including the hot box, loop tubes and the top sections of the pressure vessel (see figure 1)
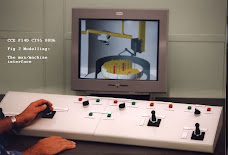
Setting up the man/machine interface:
Significant CAD modelling progress has been made with the building of a Control Panel replicating the actual WAGR RDM Panel, including 4 joysticks and switches that control the rotating floor shield, the transfer hoist slew beam and the 2 hoist transfer movements (see figure 2). Additionally most of the detailed comprehensive dismantling tasks for the removal of the hot-box using RDM, have been included in the 3D CAD modelling application.
The acoustic declogging of the electro filters:
ESP filters could be rapidly be overloaded with the abundant and very fine aerosols produced by the thermal cutting. For these reasons, a method applicable in situ without removal of the filter elements and without liquid waste production was developed: acoustic cleaning ( fig 3).
Waves produced by the vibration of a membrane displace the air in which they travel: this is acoustic energy. This energy has two main parameters: the fundamental frequency measured in Hertz and its intensity measured in decibels (dB).
Compressed air is used to vibrate the membrane of the used horn, producing sufficient acoustic energy to break the adhesive bonds between the particles and the collection surfaces and thus cleaning the electrostatic precipitator.
Thanks to the addition of silencers placed in a ring around the acoustic horn, a very acceptable sound level was reached. This device is efficient and very easy to use. The horn is compressed air driven and the supply is controlled by a solenoid valve mounted in the supply line pipework.
First trial in WAGR
In February 1998, first trials on the effectiveness of the acoustic horn have been completed although the efficiency of the declogging of the ESP internal structure was not easy because the ionizer and the collector were rather clean. However, after pulses of 1 second, the radiation dose rate measurements in contact with the collection pot showed an increase from 28 µSvh-1 to 50 µSvh-1 and up to 70 µSvh-1 with 5 more pulses of 1 second due to a removal of a small amount of particulate probably from the ESP internal walls.
The noise due to the horn was heard by a man placed at the floor just above but not by a man whose position was higher (with two floors of difference).
Anticipated use for hot-box cutting, campaign 3, was considered.
The ultra-violet laser cleaning, which enables remote removal (2 to 6 meters) of the smearable and/or fixed contamination.
The optical equipment called LECDIN enables the laser to be focussed to a spot of 25 mm wide by 2 mm high at a distance of 2 m, which uniformly scans an area 1.5 m by 1.5 m. Each shot has 350 mJ of energy, 306nm, 12 Mw of power and a repetition rate of 150 Hz.
A He-Ne red laser beam, coaxial to the UV beam, enables remote focusing of the laser impact. A camera built into the LECDIN optics locates the red pointer. The zone to be treated is defined using a beam control joystick. The computer (PC) does the rest .
During two 2-day campaigns, the instrumentation was received and tested.
On 23 and 24 June 1999, we proceeded with real shots on the following :
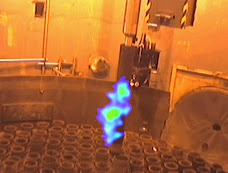
-a cylindrical grab, with fixed contamination set at 200 c/s/cm² (figure 4). It is set flat on the turntable and is treated on both sides by 180° rotation of the turntable. Large streams of violet light stream spurt out from the flush impacts, as shown by the figure. The dull surface of this stainless steel object shines like new after the treatment, some hot points at 10-20 c/s/cm² remain, but the treatment is not continued.
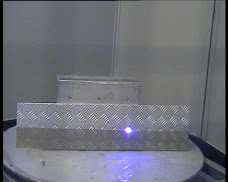
-on 23 and 24 February 2000, a second campaign was launched. This time corrugated sheet aluminium is proposed for decontamination. Its contamination was also set at 200 c/s/cm².
As in the preceding case, the dull alumina is removed by the laser scanning, and a shiny surface appears. The unevenness themselves are cleaned well (figure 5). After thorough treatment, then a second partial treatment, the object is left at less than 20 c/s/cm² in spots. No contamination is observed in the turntable premises.
Here again, tests show the machine's high efficiency, which does not cause any thermal effect and returns the surface to its original condition. Even painted objects can be treated without significant paint stripping
The LECDIN device would consist mainly of a powerful Exciplex laser and a penetration through the concrete wall opposite the RDM, as laser beam positioning and control provisions. This type of laser does not involve any thermal phenomena and therefore presents no danger.
The Video Gamma Camera, allows remote detection of any slightly irradiating object.
With this type of tool, on can control the cutting, movement and management of any irradiating object. This enables to improve the work scenario, insofar as the irradiating objects can be removed by remote operations, the remainder of the structure being cut manually.
Although the application of these four tools was hindered by the evolution on the dismantling site itself, we hope that their intrinsic qualities will make them more widely used in the future.
Inscription à :
Publier les commentaires (Atom)

Aucun commentaire:
Enregistrer un commentaire